Тема проекта: Разработка типоразмерного ряда прецизионных мехатронных устройств стабилизации, позиционирования и наведения бортовой аппаратуры космической и авиационной техники.
Сроки проведения работ: 2015-2018гг
Соглашение: №218/4973 от 29 июля 2015 года
Общий объем бюджетного финансирования:150 млн. руб.
Заказчик: Министерство науки и высшего образования РФ
Получатель субсидии: АО "ИСС" им. академика М.Ф. Решетнева
Головной исполнитель: БГТУ «ВОЕНМЕХ» им. Д.Ф. Устинова
Цели и задачи проекта: Создание образцов конкурентоспособных прецизионных электромеханических устройств с параллельной кинематикой для систем наведения, слежения, позиционирования и стабилизации изделий аэрокосмического назначения нового поколения, разработка технологий по изготовлению этих систем, а также организация импортозамещающего высокотехнологичного производства.
В составе мехатронных устройств разрабатывались:
- Высокоточный линейный механизм (ЛМ) линейного привода в вариантном исполнении по величине рабочего хода;
- Модуль управления (МУ) линейного привода (ЛП);
- Система управления линейным приводом (СУЛП) на базе конструкции линейного механизма и модуля управления линейным приводом (МУЛП);
- Система управления гексаподом (СУГ), построенная на базе блока механики гексапода, блока управления гексаподом (БУГ);
- Блок управления гексаподом (БУГ).
В результате работ были разработаны различные варианты исполнительных механизмов и элементов систем управления. Проведены серии исследовательских, лабораторных и конструкторских испытаний.
Разработаны различные варианты кинематических конфигураций мехатронных устройств, отвечающих техническому заданию по требованиям точности, жесткости и надежности и грузоподъемности.
Разработан уникальный математический аппарат, позволяющий осуществлять управление, настройку и калибровку сложной кинематической конфигурации мехатронного устройства.
Разработаны и изготовлены макетные образцы линейных приводов и системы управления приводами. На их основе разработан макетный гексапод, позволивший произвести отладку системы управления мехатронным устройством.
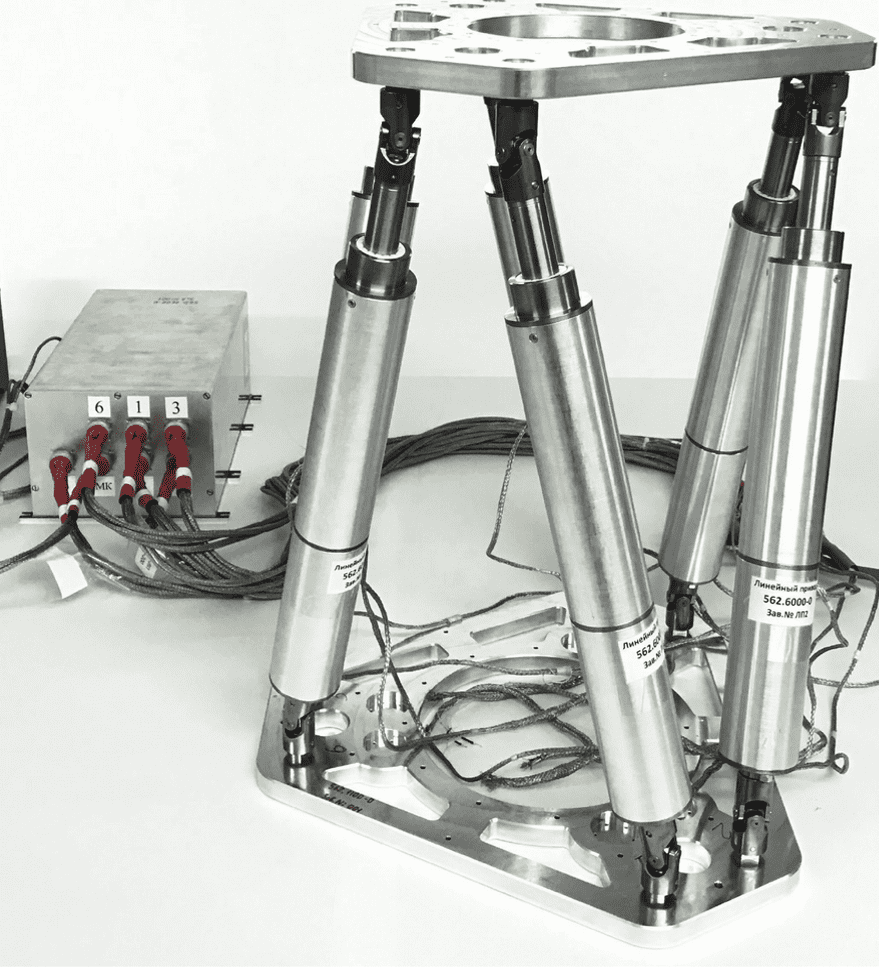
Макет мехатронного устройства “Гексапод”
В ходе дальнейшей доработки по результатам лабораторных и конструкторских испытаний были разработаны опытные образцы линейных приводов, системы управления приводом и гексаподом. В результате данных работ была создан опытный образец мехатронного устройства “Гексапод”.
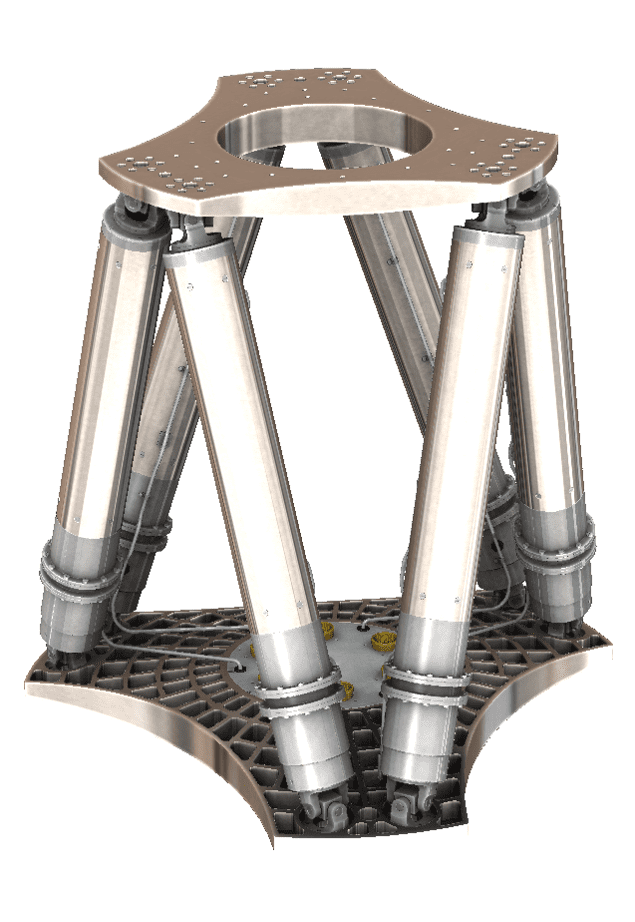
Трехмерная модель опытного образца платформы “Гексапод”
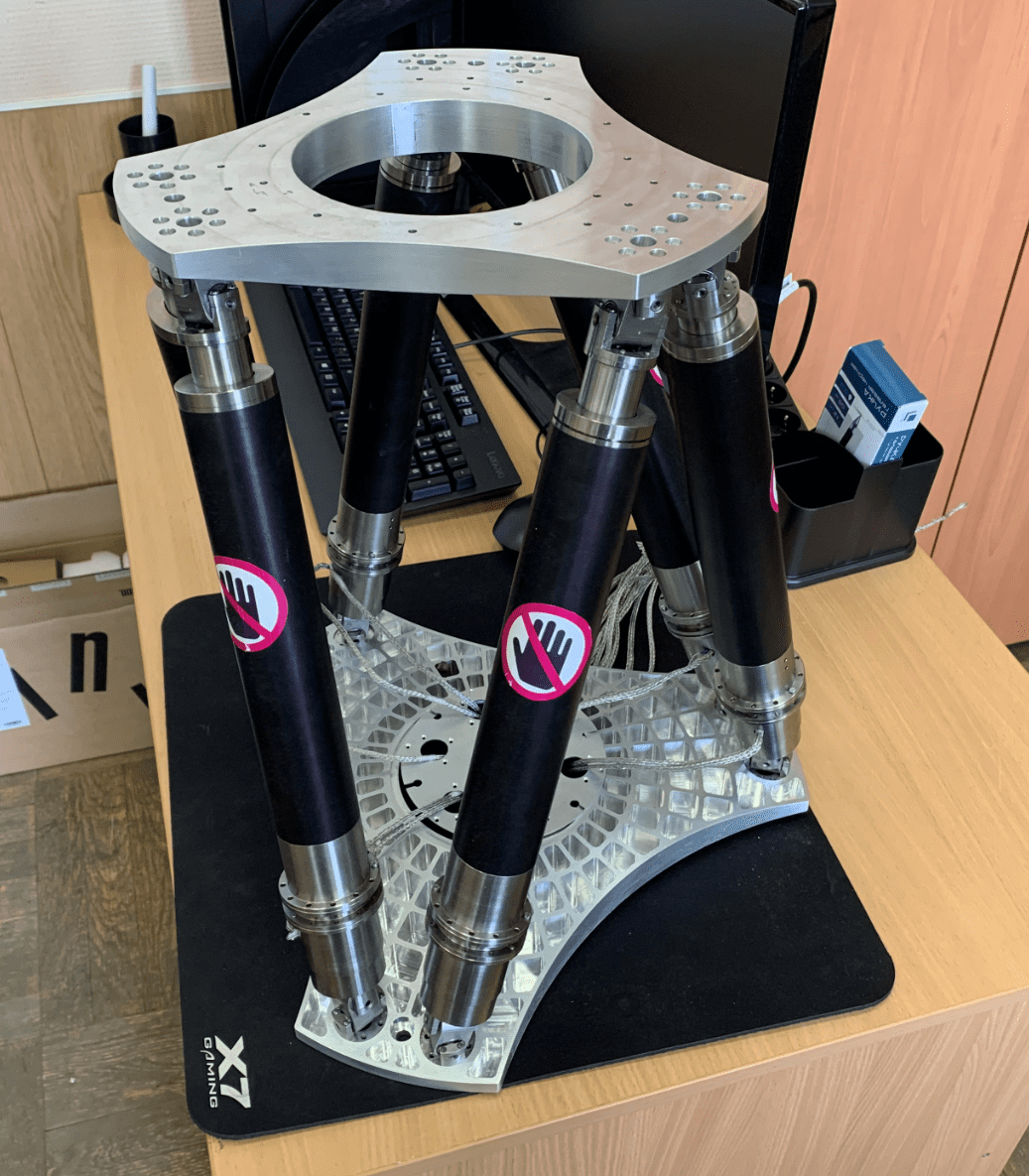
Опытный образец платформы “Гексапод”
Испытания платформы “Гексапод”
Общий итог работ: Разработан опытный образец мехатронной платформы “Гексапод”. Успешно проведены серии приемочных испытаний на территории индустриального партнера. Разработаны стендовые установки и приспособления для отладки и калибровки элементов системы мехатронного устройства. Защищены авторским правом уникальные технические и программные решения, полученные в ходе работ. Сформирован перспективный коллектив молодых ученых, аспирантов и студентов.